2D elastic collision engine
For Python language
python simulation.py
WIKIPEDIA
An elastic collision is an encounter between two bodies in which the total kinetic
energy of the two bodies after the encounter is equal to their total kinetic energy
before the encounter.
Perfectly elastic collisions occur only if there is no net
conversion of kinetic energy into other forms (such as heat or noise) and therefore
they do not normally occur in reality.
During the collision of small objects, kinetic energy is first converted to potential
energy associated with a repulsive force between the particles (when the particles
move against this force, i.e. the angle between the force and the relative velocity
is obtuse), then this potential energy is converted back to kinetic energy (when the
particles move with this force, i.e. the angle between the force and the relative
velocity is acute). The collisions of atoms are elastic collisions
(Rutherford backscattering is one example).
Two-dimensional
For the case of two colliding bodies in two dimensions, the overall velocity of each
body must be split into two perpendicular velocities: one tangent to the common
normal surfaces of the colliding bodies at the point of contact, the other along the
line of collision. Since the collision only imparts force along the line of collision,
the velocities that are tangent to the point of collision do not change.
The velocities along the line of collision can then be used in the same equations as a
one-dimensional collision. The final velocities can then be calculated from the two
new component velocities and will depend on the point of collision. Studies of
two-dimensional collisions are conducted for many bodies in the framework of a
two-dimensional gas.
In a center of momentum frame at any time the velocities of the two bodies are in
opposite directions, with magnitudes inversely proportional to the masses.
In an elastic collision these magnitudes do not change. The directions may change
depending on the shapes of the bodies and the point of impact.
For example, in the case of spheres the angle depends on the distance between the
(parallel) paths of the centers of the two bodies. Any non-zero change of direction
is possible: if this distance is zero the velocities are reversed in the collision;
if it is close to the sum of the radii of the spheres the two bodies are only slightly
deflected.
Assuming that the second particle is at rest before the collision, the angles of
deflection of the two particles, v1 and v2, are related to the angle of deflection
theta in the system of the center of mass by
Assuming that the second particle is at rest before the collision, the angles of deflection of the two particles, and ,
are related to the angle of deflection in the system of the center of mass by:
\tan \theta_1=\frac{m_2 \sin \theta}{m_1+m_2 \cos \theta},\qquad
\theta_2=\frac{{\pi}-{\theta}}{2}.
The magnitudes of the velocities of the particles after the collision are:
\begin{align}
v’_1 &= v_1\frac{\sqrt{m_1^2+m_2^2+2m_1m_2\cos \theta}}{m_1+m_2} \
v’_2 &= v_1\frac{2m_1}{m_1+m_2}\sin \frac{\theta}{2}.
\end{align}
The final x and y velocities components of the first ball can be calculated as:
\begin{align}
v’_{1x} &= \frac{v1\cos(\theta_1-\varphi)(m_1-m_2)+2m_2v2\cos(\theta_2-\varphi)}{m_1+m_2}\cos(\varphi)+v1\sin(\theta_1-\varphi)\cos(\varphi + \tfrac{\pi}{2})
\end{align}
\begin{align}
v’_{1y} &= \frac{v1\cos(\theta_1-\varphi)(m_1-m_2)+2m_2v2\cos(\theta_2-\varphi)}{m_1+m_2}\sin(\varphi)+v1\sin(\theta_1-\varphi)\sin(\varphi + \tfrac{\pi}{2})
\end{align}
where v’1 and v’2 are the scalar sizes of the two original speeds of the objects, m’1 and m’2 are their masses, θ’1 and θ’2 are their movement angles, that is, v{1x} = v_1\cos\theta_1,\ ;
v{1y}=v_1\sin\theta_1 (meaning moving directly down to the right is either a −45° angle, or a 315° angle), and lowercase phi (φ) is the [[contact angle]]. (To get the x and y velocities of the second ball, one needs to swap all the ‘1’ subscripts with ‘2’ subscripts.)
This equation is derived from the fact that the interaction between the two bodies is easily calculated along the contact angle, meaning the velocities of the objects can be calculated in one dimension by rotating the x and y axis to be parallel with the contact angle of the objects, and then rotated back to the original orientation to get the true x and y components of the velocities.
In an angle-free representation, the changed velocities are computed using the centers x1 and x2 at the time of contact as
\begin{align}
\mathbf{v}’_1 &= \mathbf{v}_1-\frac{2 m_2}{m_1+m_2} \ \frac{\langle \mathbf{v}_1-\mathbf{v}_2,\,\mathbf{x}_1-\mathbf{x}_2\rangle}{|\mathbf{x}_1-\mathbf{x}_2|^2} \ (\mathbf{x}_1-\mathbf{x}_2),
\end{align}
\begin{align}
\mathbf{v}’_2 &= \mathbf{v}_2-\frac{2 m_1}{m_1+m_2} \ \frac{\langle \mathbf{v}_2-\mathbf{v}_1,\,\mathbf{x}_2-\mathbf{x}_1\rangle}{|\mathbf{x}_2-\mathbf{x}_1|^2} \ (\mathbf{x}_2-\mathbf{x}_1)
\end{align}
In the particular case of particles having equal masses, it can be verified by direct computation from the result above that the scalar product of the velocities before and after the collision are the same, that is Although this product is not an additive invariant in the same way that momentum and kinetic energy are for elastic collisions, it seems that preservation of this quantity can nonetheless be used to derive higher-order conservation laws.
This library provides efficient methods for resolving 2D elastic collisions, implemented in Cython and C for high performance. It is designed to integrate seamlessly with Python and Pygame, enabling real-time simulations.
Trigonometric Method
This approach calculates the interaction between two bodies using the contact angle. It relies on trigonometric functions to determine the direction and magnitude of velocity changes after a collision.
Angle-Free Method
This method avoids angle calculations entirely. Instead, it computes the post-collision velocities using only vector operations (e.g., dot product) based on the positions of the object centers (x₁ and x₂) at the moment of impact.
Optimized for real-time simulations such as:
Offers fast and accurate collision resolution, but is not a full particle engine — it focuses solely on the core logic required to resolve elastic collisions.
The library emphasizes simplicity and performance, allowing you to build complex object interactions with ease and confidence.
The Angle-Free Method is the fastest of the two, as it avoids computationally expensive trigonometric functions (cos, sin, atan2, etc.). It leverages vector math for collision resolution. In contrast, the Trigonometric Method requires calculating the contact angle and individual object angles before determining the resulting velocities (v₁, v₂).
The elastic collision algorithm must be called after detecting a collision between objects.
You can choose between two modules: ec_game and ec_real. These libraries are functionally similar, with one key difference:
ec_game includes an optional invert flag that allows you to invert the final velocity vectors.invert=True in typical 2D video game environments, where the y-axis is inverted. The default is invert=False.The Trigonometric Method is generally less accurate than the Angle-Free Method, due to:
float) in the library1e-5Input vectors are not normalized in order to conserve total kinetic energy during collision resolution.
In a typical display (such as a game screen), the Y-axis is inverted compared to the standard Cartesian coordinate system.
If an object’s position is at the center of the display:
In other words, the display coordinate system increases Y downward, whereas in Cartesian space, Y increases upward.
This inversion must be taken into account when applying elastic collision equations.
A common solution is to invert the Y component of velocity vectors before or after collision resolution, depending on your coordinate system.
| Vector Direction | Resultant Velocity | Object Center |
|---|---|---|
| v₁ ( 0.707, 0.707 ) | v₁′ (−0.707, −0.707 ) | C₁ ( 0.000, 0.000 ) |
| v₂ (−0.707, −0.707 ) | v₂′ ( 0.707, 0.707 ) | C₂ ( 1.414, 1.414 ) |
figure 1
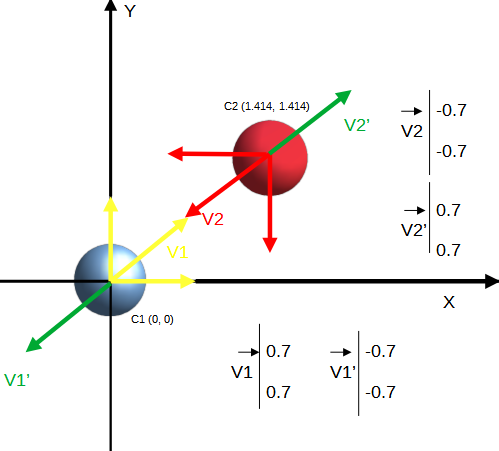
This diagram illustrates a 2D elastic collision between two circular objects, represented as colored spheres (C₁ and C₂), in a top-down Cartesian space.
C₁ (Blue Sphere)
v₁ = (0.707, 0.707) → Yellow arrowv₁′ = (−0.707, −0.707) → green arrowC₂ (Red Sphere)
v₂ = (−0.707, −0.707) → Red arrowv₂′ = (0.707, 0.707) → Green arrow| Vector direction | Resultant | Object centre | |
|---|---|---|---|
| v1( 0.707, 0.707) | v1’(-0.707, -0.707) | C1 ( 0, 0) | |
| v2(-0.707, -0.707) | v2’( 0.707, 0.707) | C2 (1.414, 1.414) |
Figure 2

While the elastic collision equations return the same vector values in both coordinate systems, their visual interpretation differs due to axis orientation.
In a real Cartesian space ℝ(x, y):
(0.707, 0.707) moves the object northeast, at a +45° angle.In a 2D game display space:
To preserve the correct physical behavior in a game engine, the Y-components of all vectors must be inverted when transitioning from Cartesian space to display space.
| Vector Direction | Resultant in ℝ(x, y) | After Inverting Y-component |
|---|---|---|
| v₁ = ( 0.707, 0.707) | v₁′ = (−0.707, −0.707) | v₁′ = (−0.707, 0.707) |
| v₂ = (−0.707, −0.707) | v₂′ = ( 0.707, 0.707) | v₂′ = ( 0.707, −0.707) |
v₁′ and v₂′ using the elastic collision equations,MIT licensecheck the link for newest version https://pypi.org/project/ElasticCollision/
Compatible WINDOWS and LINUX for platform x86, x86_64
pip install ElasticCollision
Checking the installed version
(Imported module is case sensitive)
>>>from ElasticCollision.ec_game import __version__>>>__version__
Download the source code and decompress the Tar or zip file
tar -xvf ElasticCollision-1.0.3.tar.gzcd ElasticCollision-1.0.3python3 setup.py bdist_wheelcd distpip3 install ElasticCollision-xxxxxx
Decompress the archive and enter ElasticCollision directory
python setup.py bdist_wheelcd distpip install ElasticCollision-xxxxxx
# FOR 2D GAME (Y-AXIS INVERTED)from pygame.math import Vector2from ElasticCollision.ec_game import momentum_trigonometryvector1 = Vector2(0.707, 0.707)centre1 = Vector2(0.0, 0.0)vector2 = Vector2(-0.707, -0.707)centre2 = Vector2(1.4142, 1.4142)mass1 = 1.0mass2 = 1.0v11, v12 = momentum_trigonometry(centre1, centre2, vector1, vector2, mass1, mass2, False)print(v11, v12)
# FOR 2D GAME (Y-AXIS INVERTED)from pygame.math import Vector2from ElasticCollision.ec_game import momentum_angle_freevector1 = Vector2(0.707, 0.707)centre1 = Vector2(0.0, 0.0)vector2 = Vector2(-0.707, -0.707)centre2 = Vector2(1.4142, 1.4142)mass1 = 1.0mass2 = 1.0v11, v12 = momentum_angle_free(vector1, vector2, mass1, mass2, centre1, centre2, False)print(v11, v12)
== RESTART: C:/Users/yoyob/AppData/Local/Programs/Python/Python36/test11.py ==pygame 2.0.0 (SDL 2.0.12, python 3.6.3)Hello from the pygame community. https://www.pygame.org/contribute.html[-0.707, -0.707] [0.707001, 0.707][-0.707, -0.707] [0.707, 0.707]>>>
Each time you are modifying any of the following filesec_game.pyx, c_game.pyx, ec_real.pyx or any external C code if applicable1) open a terminal window2) Go under the directory game3) run : python setup_ec_game.py build_ext --inplace --force4) Go under the directory real5) run : python setup_ec_real.py build_ext --inplace --forceIf you have to compile the code with a specific pythonversion, make sure to reference the right python versionin (python38 setup_ec_real.py build_ext --inplace)If the compilation fail, refers to the requirement section andmake sure cython and a C-compiler are correctly install on yoursystem.- A compiler such visual studio, MSVC, CGYWIN setup correctly onyour system.- a C compiler for windows (Visual Studio, MinGW etc) installon your system and linked to your windows environment.Note that some adjustment might be needed once a compiler isinstall on your system, refer to external documentation ortutorial in order to setup this process.e.g https://devblogs.microsoft.com/python/unable-to-find-vcvarsall-bat/
Yoann Berenguer
numpy >= 1.18pygame >=2.0.0cython >=0.29.21
MIT License
Copyright (c) 2019 Yoann Berenguer
Permission is hereby granted, free of charge, to any person
obtaining a copy of this software and associated documentation
files (the “Software”), to deal in the Software without
restriction, including without limitation the rights to use,
copy, modify, merge, publish, distribute, sublicense, and/or
sell copies of the Software, and to permit persons to whom the
Software is furnished to do so, subject to the following
conditions:
The above copyright notice and this permission notice shall be
included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND,
EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
OTHER DEALINGS IN THE SOFTWARE.
>>> from ElasticCollision import *>>> from ElasticCollision.tests.test_ec_game import run_testsuite>>> run_testsuite()>>> from ElasticCollision import *>>> from ElasticCollision.tests.test_ec_real import run_testsuite>>> run_testsuite()
Linkshttps://en.wikipedia.org/wiki/Elastic_collision