ROS Kinetic Compatible ground mobile robots (2WD, 4WD, Ackermann Steering, Mecanum Drive)
Mobi_robot is a suite of Open Source ROS compatible robots that aims to provide students, developers, and researchers a low-cost platform in creating new exciting applications on top of ROS.
You can read the full tutorial how to build your robot here.
Supports multiple types of robot base:

Works on:
Fabricate your own Teensy 3.1/3.2 shield,
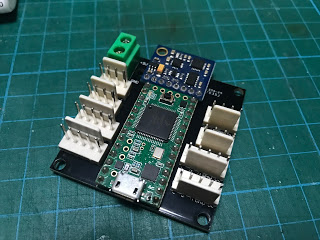
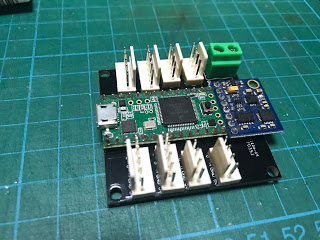
or wire it on your own. Wiring diagrams are also provided.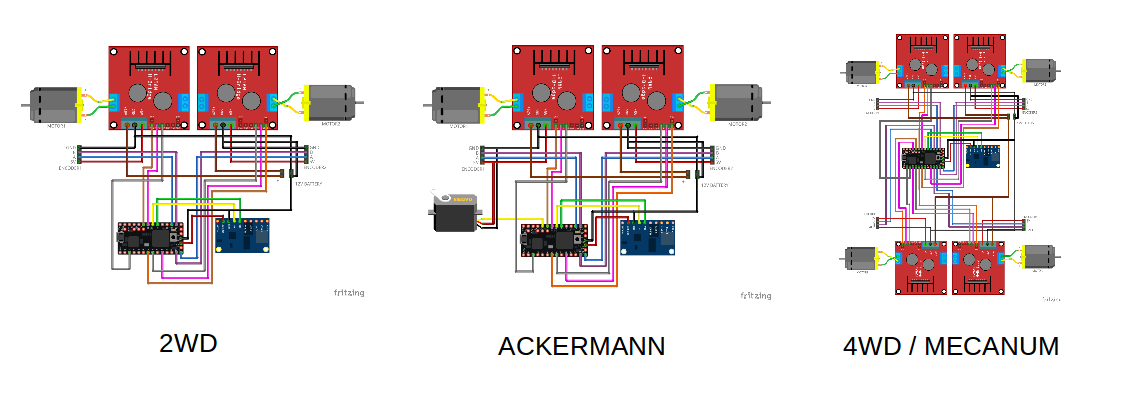

git clone https://github.com/linorobot/lino_install && cd lino_install./install <base> <sensor>
Flexible and configurable components.
linorobot_ws/teensy/firmware/lib/config/mobi_base_config.h
//uncomment the base you're building#define LINO_BASE DIFF_2WD// #define LINO_BASE DIFF_4WD// #define LINO_BASE ACKERMANN// #define LINO_BASE HOLO_4W
//uncomment the IMU you're using#define USE_GY85_IMU// #define USE_MP6050_IMU (not supported yet)
//uncomment the motor driver you're using#define USE_L298_DRIVER// #define USE_BTS7960_DRIVER
//define your robot' specs here#define MAX_RPM 330 // motor's maximum RPM#define COUNTS_PER_REV 1550 // wheel encoder's no of ticks per rev#define WHEEL_DIAMETER 0.10 // wheel's diameter in meters#define PWM_BITS 8 // PWM Resolution of the microcontroller#define BASE_WIDTH 0.235 // width of the plate you are using
cd ~/mobi_robot_ws/src/mobi_robot/teensy/firmwareplatformio run --target upload
roslaunch mobi_robot bringup.launch
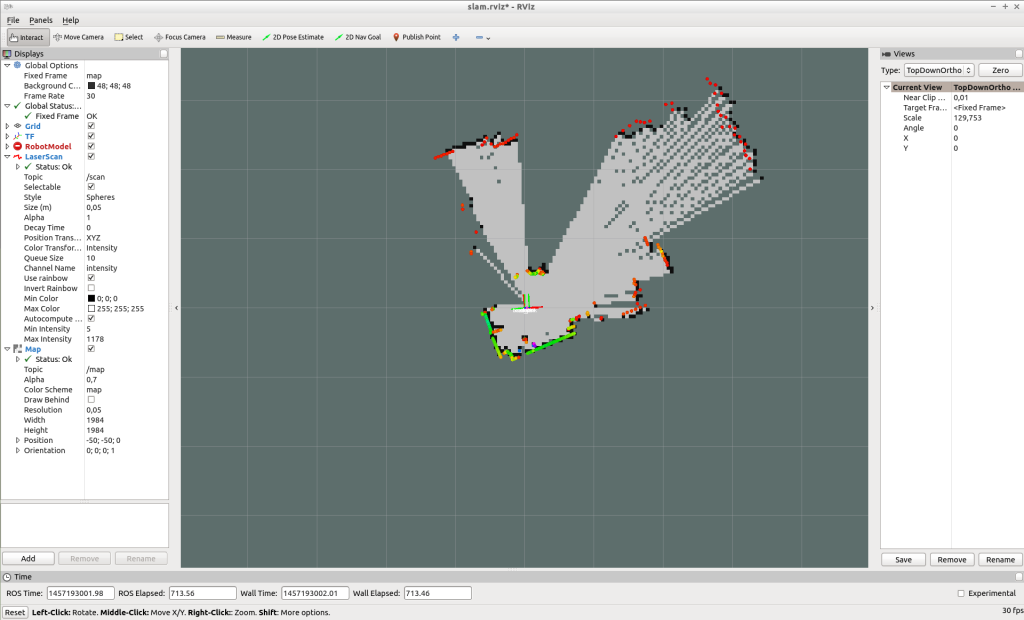
roslaunch mobi_robot slam.launch
roslaunch mobi_robot bringup.launch
roslaunch mobi_robot navigate.launch